TEL:400-600-3588
http://www.4007222999.cn
西安AI科技特訓7天夏令營
- 線路網址:http://www.4007222999.cn/lines/show_772.html
- 出發城市:
- 出行天數:7天
- 往返交通:
活動詳情
學校簡介
西安樂博士夏令營創建于2013年,是集人工智能與機器人教育為一體的科技創新教育與綜合服務運營商,擁有以培訓、認證、軟硬件開發與銷售、競賽組織為生態的科技創新教育體系。
作為 VEX 中國的戰略合作伙伴和美國卡耐基梅隆大學機器人學院 ROBOTC 機器人教育體系在中國的合作機構,樂博士始終持“學有所依、學有所長、學有所用”的理念,將國際領先的 STEAM 教育課程引入國內,旨在全方位培養當代青少年的創新與創造能力,為國家科技發展培養人才。
課程簡介
縱觀每一次工業革命,一個新技術的產生,往往能顛覆和推進整個人類文明的發展。計算機,互聯網,機器人是全球增長最快的熱門產業之一,也是第三次工業革命的重要標志之一。在第四次工業革命中,產生顛覆的支點無疑是人工智能技術。
AI客服,自動駕駛汽車,智能服務機器人,自動翻譯,自動字幕,能說會唱AI虛擬人,作畫,AI作曲等技術不斷地走入我們的生活,改變我們的認知。預計2035年將有50%的人類工作會被AI技術替代;自動駕駛、智能服務機器人,在未來將全面進入生活各個角落。
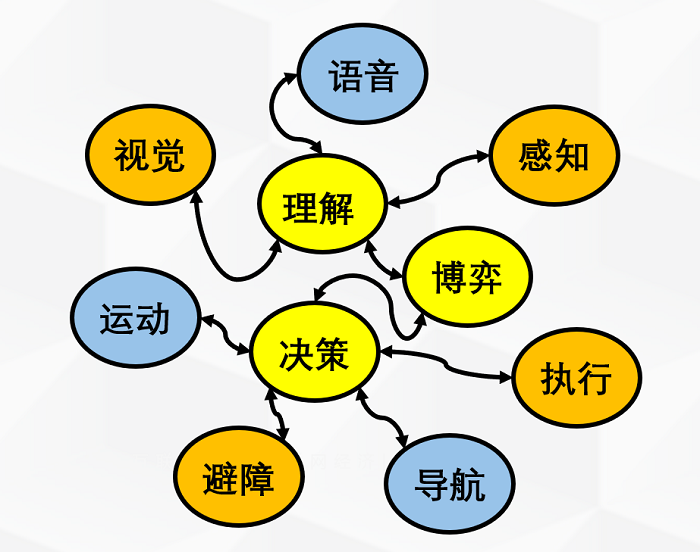
智能機器人是一種自動化的機器,這種機器具備一些與人或生物相似的智能能力,如感知能力、規劃能力、動作能力和協同能力,是一種具有高度靈活性的自動化機器。按照應用方向分類可以分為:工業智能機器人,農業智能機器人,服務機器人(各種場景),教育型機器人,特種機器人。
智能機器人,是一個復雜的系統。不僅有運動,還有感知,思考,決策,語音交互等系統,來一起協同工作。如何讓這些系統和硬件有機地結合在一起,并且互相獨立,可以方便調試和修改。ROS是一個很好的機器人通訊框架,它采用節點之間通信的方式來部署機器人。
如果您的孩子熱愛科學,
那就不要錯過這個營了。
這個暑假,AI科技暑期營
歡迎各位少年一起來把握時代脈搏,
感受科技的魅力!

課程內容
緊貼前沿技術及生活,以Python編程語言作為軟件工具、AI-KIT通用教學平臺作為實踐平臺,學習智能機器人算法、硬件,以及控制技術,學習人工智能原理,算法,技術,并以此作為基礎,在實踐中鍛煉人工智能技術與機器人技術相結合的能力,創建有意義的人工智能機器人,去解決生活中的問,并以此作為日后學習、研究、工作的經驗基礎。
課程特色
AI-KIT:
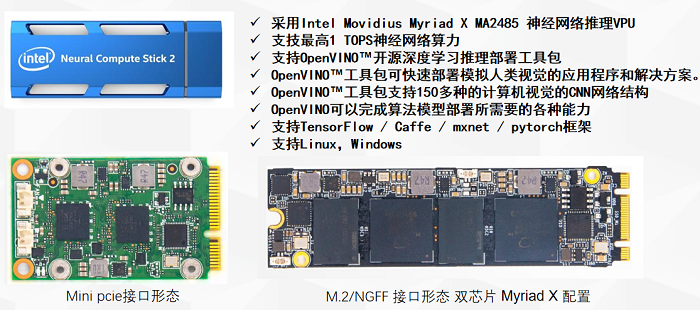
1、AI-KIT是一個人工智能和機器人的教學通用平臺,采用Intel nuc高性能主機作為機器人的大腦來進行計算、RealSense深度相機作為機器視覺和核心硬件為機器人提供立體視覺,Movidius神經網絡計算棒為機器人提供視覺神經網絡的推理加速。AI-KIT搭載Ubuntu系統并集成ros機器人開發環境。產品的定位是人工智能機器人通用教學平臺。
2、AI-KIT的主要定位是智能機器人實驗平臺,可以開展ROS機器人開發,人工智能技術結合機器人的應用。例如視覺,語音,自主導航等。
Gazebo:
1、構建機器人運動仿真模型
2、構建現實世界各種場景的仿真模型
3、構建傳感器仿真模型
4、為機器人模型添加現實世界的物理性質
課程理念
在教學過程中,通過豐富的軟硬件互動,讓學生走進AI世界,了解AI技術。通過學習和應用產生破解AI智能機器人奧秘的成就感和滿足感,進而促進學生的學習積極性。學生將通過模仿->修改->創新的過程,逐步熟悉AI技術,熟悉AI領域智能硬件,消除對AI技術的陌生感和距離感,打造自己的專屬AI機器人。
師資介紹

楊少凡
人工智能與ROS機器人軟硬件開發工程師
高中高校人工智能課程開發與培訓講師
電子學會機器人工程等級考試標準工作組成員
Intel 人工智能openvino中文社區講師
世界機器人大賽AI探索賽事設計與培訓講師

張禮政
英特爾人工智能項目師資認證培訓講師
Robot Mesh師資認證培訓講師
樂高教育認證講師
十三年以上(STEAM教學與課程研發)工作經驗
行程安排
開營
09:00-20:00:注冊報道,入營,安排住宿,開營儀式
基礎及編程
09:00-10:20 人工智能導論,Linux基礎操作;
10:40-12:00 Python基礎編程

14:00-15:30 Al-KIT底盤硬件介紹及控制;
16:00-18:00 使用python編程,控制機器人基本運動;挑戰:Al-KIT機器人迷宮挑戰
TTS語音合成
09:00-10:20 Python api調用;
10:40-12:00 python語音合成及播放

14:00-15:30 uvc攝像頭介紹, realsense深度攝像頭介紹;opencv基礎,打開圖片,攝像頭,顯示畫面;
16:00-18:00 使用opencv對圖像進行處理(灰度,二值,邊緣);實踐:調用Pyzbar庫識別二維碼/條形碼
ROS機器人調試工具
09:00-10:20 ros機器人操作系統介紹及應用場景;
10:40-12:00 ros終端調試,rqt工具箱, rviz圖形工具

14:00-15:30 ros基礎操作,二維仿真機器人小烏龜實踐節點,功能包及工作空間介紹;
16:00-18:00 rospy訂閱者編寫;創建自己的工作空間,功能包,節點, launch文件
機器人建圖導航
09:00-10:20 AIKIT導航功能包介紹;建圖導航實踐;
10:40-12:00 SLAM技術介紹,Gmapping功能包學習及地圖建立;Movebase導航包介紹amcl定位,路徑規劃及導航參數介紹

14:00-15:30 導航過程中的動態參數調節
16:00-18:00 Action介紹,Python編程,控制機器人完成多點導航和隨機導航;實踐:定點導航并語音播報,完成講解機器人demo
AI-KIT物體識別
09:00-10:20 物體識別技術及應用介紹,主流人工智能開發平臺,硬件介紹intel神經網絡計算棒及openvino介紹;
10:40-12:00 Al-KIT物體識別技術介紹及實踐

14:00-15:30 使用Openvino優化神經網絡模型模型的加載和使用
16:00-18:00 實踐:識別物體后使用Python語音播報
AI-KIT綜合編程挑戰
09:00-10:20 ros語音合成,識別,語義處理功能包介紹自然語言處理-圖靈api;
10:40-12:00 語音導航和物體識別并語音播報,完成物體尋找功能
14:00-15:30 筆試+實操綜合考試;
16:00-18:00 結營儀式,證書頒發